Известны следующие способы формирования группового сигнала:
Автовыбор (селективное сложение);
Линейное сложение;
Оптимальное (взвешенное) сложение;
Комбинированный способ.
Помехоустойчивость этих способов формирования группового сигнала чаще всего оценивается энергетическим критерием, т. е. увеличением отношения сигнал/помеха при разнесенном приеме по сравнению с отношением сигнал/помеха при одиночном приеме. В случае передачи дискретных сигналов помехоустойчивость целесообразно оценивать и вероятностным критерием, позволяющим судить о вероятности ошибок при разнесенном и одиночном приемах.
Рассмотрим основные принципы реализации систем связи с разнесенным приемом при различных способах формирования группового сигнала и оценим их помехоустойчивость.
АВТОВЫБОР
Автовыбор состоит в том, что в любой момент времени выбирается приемный тракт с наибольшим выходным сигналом. При этом для i -гo канала с наибольшим в данный момент сигналом весовой коэффициент С j = 1,а для всех остальных каналов С j i = 0. т. е. результирующий сигнал согласно выражениям (6.2), (6.3). (64) может быть записан в виде
где ![]() .
.
Вот почему автовыбор называют также селективным (избирательным) сложением.
Структурная схема приемного устройства с оптимальным автовыбором при сдвоенном приеме приведена на рис, 6.1. Колебания от обоих приемников поступают на устройство сравнения уровней. В результате сравнения уровней колебаний вырабатывается управляющий сигнал, который к выходному устройству подключает приемник с большим уровнем сигнала. Приемник с меньшим уровнем сигнала в это время отключается. Для уменьшения искажений сигналов время переключения приемников должно быть малым. Система с автовыбором пригодна для приема телефонных и телеграфных сигналов в том случае, если время переключения приемников не превышает 15-20 мкс.
Место включения устройств при приеме AM сигналов существенного значения не имеет. Они могут включаться либо до детекторов, либо после них.
При приеме ЧМ сигналов устройство сравнения должно располагаться до ограничителей, так как после ограничителей уровни сигналов одинаковы и теряется информация о том, сигнал какого канала больше. В случае приема частотно-манипулированных сигналов управляющие устройства необходимо располагать после частотных детекторов. Если управляющие устройства расположить до частотных детекторов, то при быстром переключении каналов одна часть элементарного импульса будет проходить через фильтр частотного детектора первого приемника, а другая часть - через фильтр частотного детектора второго приемника. В таком случае во избежание искажений сигнала фильтры частотных детекторов должны рассчитываться на пропускание импульсов более коротких, чем длительность элементарного импульса. Это привело бы к существенному снижению помехоустойчивости.

Для количественной оценки помехоустойчивости системы связи с оптимальным автовыбором по энергетическому критерию необходимо определить и сравнить средние значения отношения сигнал/помеха при одиночном приеме и оптимальном автовыборе. Среднее значение мощности полезного сигнала можно найти по формуле
 , (6.6)
, (6.6)
где Т - интервал усреднения, значительно больший периода изменения передаваемого сигнала A(t).
В радиодиапазоне скорость изменения A(t)
значительно выше скорости изменения коэффициента передачи канала a i (t).
Выбирая T А <
 (6.7)
(6.7)
 (6.8)
(6.8)
Среднеквадратичное значение передаваемого сигнала.
Среднеквадратичное значение аддитивных помех для всех ветвей разнесенного приема можно считать одинаковым, т. е.
 (6.9)
(6.9)
Отношение сигнал/помеха в i -й ветви равно
 , (6.10)
, (6.10)
Величина h i 2 (t) изменяется во времени из-за изменения коэффициентаa i (t) , так как h 0 - величина постоянная. Усредненное на интервале T1 >> Т a значение отношения сигнал/помеха приодиночном приеме (в i -й ветви) определяется выражением
Для стационарных случайных процессов среднее по времени равно среднему по ансамблю, т. е.
![]() ,
(6.13)
,
(6.13)
где W(а 2 i)- плотность вероятности квадрата коэффициента передачи канала.
Прежде всего найдем выражение для распределения коэффициента передачи канала, исходя из известного правила преобразования случайных величин:
 .
(6.14)
.
(6.14)
Учитывая, что огибающая амплитуды сигнала пропорциональна коэффициенту передачи канала, и выбирая для простоты последующих выкладок коэффициент пропорциональности, равный , получим
т.е. . (6.15)
При интервалах наблюдения до 10 мин плотность вероятности огибающей амплитуды сигнала W(U), как отмечалось, определяется релеевским законом (1.12). Подставляя (6.15) и (1.12) в (6.14), получим
![]() .
(6.16)
.
(6.16)
Теперь по правилу (6.14) находим плотность вероятности квадрата коэффициента передачи канала
![]() ,
(6.17)
,
(6.17)
вычисляем интеграл (6.13)
 , (6.18)
, (6.18)
И получаем окончательное выражение для среднего значения отношения сигнал/помеха при одиночном приеме:
Вероятность того, что случайная величина h i 2 в i-м канале при одиночном приеме станет меньше некоторого значения h 2 , определяется интегральной функцией распределения вероятностей
 . (6.20)
. (6.20)
Из выражения (6.20) по правилу (6.14) находим
 ; (6.21)
; (6.21)
 . (6.22)
. (6.22)
Если изменения a i ., а следовательно, и h i в различных каналах считать независимыми, то при n -кратном разнесении вероятность одновременного уменьшения отношения сигнал/помеха во всех каналах ниже порога h 2 будет определяться n -кратным произведением вероятностей, определяемых выражениями (6.21) и (6.22), т. е.
 . (6.23)
. (6.23)
Из (6.23) находим плотность вероятности отношения сигнал/ помеха при n-кратном разнесении:
 . (6.24)
. (6.24)
По аналогии с (6.13) среднее значение отношения сигнал/помеха при n -кратном разнесении определяется интегралом
 ,
(6.25)
,
(6.25)
В результате интегрирования по частям с использованием бинома Ньютона и вычисления интеграла (6.25) получим
откуда следует, что отношение сигнал/помеха при оптимальном автовыборе определяется отношением сигнал/помеха при одиночном приеме h 0 2 и кратностью разнесения п. Отношением
 . (6.27)
. (6.27)
оценивается выигрыш по мощности разнесенного приема с автовыбором по сравнению с одиночным приемом. Значения В n при различных кратностях разнесения приведены в таблице 6.1.
Для приближенной оценки вероятности ошибок при разнесенном приеме дискретных сигналов предположим, что можно указать некоторую граничную величину h 2 гр которая характеризуется тем, что при h 2 > h 2 гр , прием происходит практически без искажений, а при h 2 < h 2 гр вероятность появления ошибок близка к единице. При сделанных допущениях интегральная функция распределения (6. 23) при h 2 = h 2 гр определяет вероятность ошибки
 . (6.28)
. (6.28)
В случаях малых значений отношения представляющих наибольший практический интерес, вероятность ошибок равна
т. е. убывает по показательному закону с увеличением кратности разнесения п.
Вероятность ошибки при одиночном приеме дискретных сигналов с активной паузой в отсутствие замираний определяется выражением
![]() . (6.30)
. (6.30)
При наличии медленных замираний вероятность ошибки в системе связи с n-кратным разнесенным приемом тех же сигналов можно определить усреднением Р 0 по всем значениям h 2 в соответствии с плотностью распределения (6.24):
 . (6.31)
. (6.31)
Интегрируя (6.31) по частям, при n=2 получим
 . (6.32)
. (6.32)
Как показано в , при n-кратном разнесении
 (6.33)
(6.33)
 |
По этой формуле на рис. 6.2 построены зависимости показывающие, что наиболее ощутимый результат, по сравнению с одиночным приемом, дает сдвоенный прием.
Поэтому с учетом экономических соображений сдвоенный прием находит самое широкое применение.
Формула (6.27) получена в предположении, что корреляция между сигналами отдельных ветвей приема отсутствует. Уменьшение выигрыша становится существенным при коэффициенте корреляции r >0,6.
В случае сдвоенного приема при большом отношении сигнал/помеха влияние корреляции между сигналами приблизительно эквивалентно уменьшению мощности сигнала в
раз. Значит, вероятность ошибки согласно (6.29) определяется выражением
![]() , (6.34)
, (6.34)
ЛИНЕЙНОЕ СЛОЖЕНИЕ СИГНАЛОВ
При линейном сложении коэффициенты усиления складываемых сигналов должны быть одинаковы, т. е. коэффициенты C d , входящие в выражение (6.4), равны единице. Равенство коэффициентов усиления приемников обычно обеспечивается общей схемой АРУ. В этом случае величина коэффициентов усиления определяется наибольшим из складываемых сигналов.

Схема приемного устройства сдвоенного приема с линейным сложением сигналов приведена на рис. 6.3. Когерентность сигналов, складываемых на промежуточной частоте, обеспечивается системой фазовой автоподстройки частоты (ФАПЧ). Несинфазность складываемых сигналов ведет к ухудшению результирующего отношения сигнал/помеха, особенно при равенстве уровней складываемых сигналов. Зависимость уменьшения сигнал/помеха суммарного сигнала от степени несинфазности < j для сдвоенного приема приведена на рис. 6.4, из которого видно, что при 38 0 потери в отношении сигнал/помеха составляют около 1 дБ, а при 50° - 2 дБ. Следовательно, фазирование сигналов с высокой точностью не обязательно. Чем больше отличаются уровни складываемых сигналов, тем меньше сказывается их несинфазность на отношении сигнал/помеха.

Место включения суммирующего устройства S, при линейном сложении зависит от вида модуляции принимаемого сигнала. При приеме AM сигналов сложение можно производить как до детекторов, так и после них, так как отношение сигнал/помеха на входе и выходе амплитудного детектора одинаково. В случае приема ЧМ сигналов сложение целесообразно производить до детекторов. Это обусловлено тем, чтона выходе частотного детектора отношение сигнал/помеха ухудшается, если на входе детектора оно ниже некоторого порогового значения. Следовательно, при сложении сигналов после частотных детекторов уменьшается и результирующее значение отношения сигнал/помеха. Кроме того, в случае линейного сложения до детектора уменьшаются искажения сигнала, вызываемые многолучевостью распространения радиоволн.
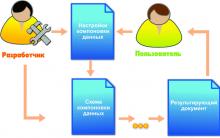
Сигнал на выходе ПП пропорционален измеряемой величине, и его нужно сравнивать с эталонным сигналом. В качестве эталонных используются специально сформированные сигналы или, как это делается в механических и электромеханических приборах, позиционные М П, скоростные М С, ускорительные М УС моменты, т. е. моменты, пропорциональные положению, скорости и ускорению подвижной системы указателя. Эталонные сигналы могут быть созданы упругими (пружинами, мембранами), демпфирующими и инерционными элементами, а также сформированы с помощью обратной связи или функциональных устройств.
Рис. 3.5. Обобщенная функциональная схема прибора
На схеме прибора (рис. 3.5) сигнал х преобразуется в первичном преобразователе ПП в сигнал F x , который сравнивается с эталонным сигналом , где создаются соответственно пружиной П , демпфером Д, инерционными силами подвижных элементов и устройством обратной связи (преобразователь Пр, усилитель Ус и моментный двигатель МД). Выходным сигналом прибора является угол φ отклонения стрелки.
Из структуры выражения видно, что любой из моментов может быть заменен моментом обратной связи, имеющим ту же зависимость от . Так, например, если , то он может заменить М П, и тогда получаем прибор с электрической пружиной. Если , то он заменяет момент М с, и прибор имеет электрический демпфер и т. д.
Уравнение движения прибора представим в виде
Для движущего и эталонных моментов можно написать
где - коэффициенты движущего, позиционного, скоростного и инерционного моментов; - оператор, формируемый в контуре обратной связи.
Подставляя (3.14) в (3.13), получим
На рис. 3.6 представлена структурная схема, эквивалентная уравнению (3.15). Звено с бесконечно большим коэффициентом усиления соответствует точному выполнению условия компенсации F x = F y .

Рис. 3.6. Структурная схема прибора
В соответствии с уравнением (3.15) передаточная функция W(р) и чувствительность S прибора будут
Рассмотрим частные случаи. В электромеханическом приборе без обратной связи (k(p)= 0) получаем
где - чувствительность прибора; - собственная частота; ![]() - относительное затухание.
- относительное затухание.
Система, имеющая передаточную функцию вида (3.17), называется колебательным звеном, параметрами которого являются
Если в выражении (3.17) k П = 0 (отсутствие пружины), то прибор становится интегрирующим
где - чувствительность; - постоянная времени.
Выражение (3.18) получено в предположении, что выходом прибора является угол φ . Если в качестве выходного сигнала взять угловую скорость φ , то передаточная функция примет вид
![]() (3.19)
(3.19)
Система, имеющая передаточную функцию вида (3.19), называется инерционным звеном.
При отсутствии в приборе пружины и демпфера (k П = k С = 0) получаем дважды интегрирующий прибор
![]() (3.20)
(3.20)
Оператор k(p) можно сформировать в различном виде. Если k(p)=k 0 , то, как следует из выражения (3.16), коэффициенты k 0 и k П равнозначны. Поэтому, как отмечено выше, можно считать k П = 0и получить требуемый позиционный сигнал за счет обратной связи, которая в этом случае выполняет роль электрической пружины. Если взять k(p)=k 0 + kp, то можно обойтись в приборе без пружины и без механического демпфера.
Преимущество приборов с электрическими пружиной и демпфером состоит в том, что обеспечивается высокая стабильность параметров прибора и упрощается его настройка и регулировка. Возможности приборов с электрической обратной связью этим не исчерпываются. Если в цепь обратной связи включить корректирующий контур, то можно получить требуемую частотную характеристику прибора. Можно, например, скорректировать динамические погрешности в заданном диапазоне частот. Если в приборе необходимо реализовать зависимость φ = F(x), то в цепь обратной связи следует включить функциональный элемент , где f - функция, обратная требуемой функции F x .
ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ ПРЯМОГО ПРЕОБРАЗОВАНИЯ
Измерительные цепи прямого преобразования состоят из преобразователей, соединенных последовательно или параллельно согласно (см. рис. 3.4, а, б).
Приборы с этими цепями просты, надежны, имеют малые массу, габаритные размеры и стоимость, обладают хорошим быстродействием. Однако погрешности их велики. Основной путь снижения погрешностей цепей прямого преобразования - снижение погрешностей каждого преобразователя, что сложно, дорого и трудоемко. Цепи прямого преобразования применяются с генераторными, параметрическими ирадиационными первичными преобразователями.
При построении измерительных цепей используются: 1) принцип согласования сопротивлений, при котором обеспечивается передача максимальной мощности от предыдущего преобразователя к последующему; 2) принцип холостого хода, когда входное сопротивление последующего преобразователя значительно больше выходного сопротивления предыдущего преобразователя, при этом обеспечиваются минимальные потери информации.
Оба эти принципа находят применение в приборостроении. В последнее время при создании точных приборов второй принцип находит преимущественное распространение.
Процесс формирования сигнала в радиоканале осуществляется в несколько этапов:
Аналого-цифровое преобразование;
Кодирование речи;
Канальное кодирование;
Модуляция.
В процессе аналого-цифрового преобразования аналоговый речевой сигнал, ограниченный полосой частот от 300 до 3400 Гц, за счет дискретизации (частота дискретизации равняется 8 кГц) превращается в амплитудно-импульсно-модулированный сигнал (АИМ). Дальше каждая из 8 дискрет АИМ-сигнала кодируется разрядным двоичным кодом, т.е. АИМ-сигнал превращается в ИКМ-сигнал. В результате на выходе аналого-цифрового преобразователя (АЦП) формируется поток, скорость которого равняется 64 кбит/с.
Из выхода АЦП оцифрованный речевой сигнал поступает на кодер речи. Кодирование речи в стандарте GSM осуществляется в рамках системы прерывчатой передачи языка (DTX), что обеспечивает включение в работу передатчика только на время разговора и отключает его в паузах и в конце разговора. Одним из основных заданий кодирования речи есть сжатие речевого сигнала с целью снижения скорости передачи. Применение при кодировании в стандарте GSM вокодерных методов на основе метода линейного предесказания (ЛП) разрешает снизить скорость передачи с 64 до 13 кбит/с. Кодированию подвергаются отрезки речевого сигнала по 20мс. За этот интервал времени такие параметры речевого сигнала, как период основного тона, характер возбуждения (громкий или звонкий согласный звук в сопоставлении с глухими звуками), коэффициент усиления остаются постоянными.
В стандарте GSM кодирование осуществляется за методом RPE-LTP (линейное предсказание с возбуждением регулярной последовательностью импульсов и долгосрочным предсказанием). Сущность метода заключается в том, что для предсказания текущей выборки используются данные с предыдущих выборок (дифференциальная ИКМ). Каждая выборка при кодировании представляется линейной комбинацией предыдущих выборок и описывается в виде коэффициентов этой линейной комбинации и закодированной разностью предсказываемой и действительной выборками. В результате такого кодирования в интервале 20мс формируется 260 бит, за счет чего скорость передачи снижается к кбит/с. Таким образом, кодер речи обеспечивает сжатие речевого сигнала почти в 5 раз (64/13=4,92).
В состав входящей информации кодера речевого сигнала, объемом 260 бит, входят:
Параметры фильтра кратковременного предсказания(36 бит);
Параметры фильтра долгосрочного предсказания (36 бит);
Параметры сигнала возбуждения (188 бит).
Канальное кодирование обеспечивает защиту от ошибок переданной информации. В стандарте GSM 260 бит информации в интервале 20мс-сегмента речи делится на 2 класса: класс 1 и класс 2. Класс 1 в свою очередь делится на два подкласса: подкласс 1а - 50 бит наиболее чувствительных, и подкласс 1b - 132 бита, умеренно чувствительных к ошибкам. К классу 2 относятся 78 бит, наименее чувствительных к ошибкам. Структурная схема канального кодирования приведена на рис.1.5.
Информация подкласса 1а кодируется циклическим кодом (53, 50). При выявлении ошибки вся выборка откидывается и заменяется предыдущей. Закодированные 53 бита подкласса 1а, 132 бита подкласса 1b и 4 дополнительных нулевых бита (всего 189 бит) подаются на сверточный кодер (2, 1, 5), скорость кодирования которого и длина кодового ограничения . Формирующие полиномы сверточного кодера , ![]() . После сверточного кодирования 378 бит вместе с 78 битами класса 2 составляют 456 бит, в результате чего скорость передачи становится равной
. После сверточного кодирования 378 бит вместе с 78 битами класса 2 составляют 456 бит, в результате чего скорость передачи становится равной ![]() кбит/с.
кбит/с.
После сверточного кодирования 456 бит подвергаются блочно-диагональному перемеживанию, которое уменьшает влияние групповых ошибок (они превращаются у ошибки малой кратности, которые исправляются при декодировании).

Рисунок 1.5 - Структурная схема канального кодирования в стандарте GSM
После перемеживания начальная последовательность из 456 бит делится на восемь 57- битовых блоков, так как в каждом слоте размещается два 57- битовых блока (114 бит). Длина слота канала трафика с учетом добавления вспомогательной и служебной информации составляет 156,25 бит. Поскольку информация одного 20- милисекундного сегмента речи занимает по одному слоту в четырех последовательных кадрах, поэтому скорость потока цифровой информации представляет (4х156,25)/20х10 -3 = 625/20х10 -3 = 31,25 кбит/с.
Эта информация (а именно 4x156,25 = 625 бит) сжимается во времени в 8 раз, так что на протяжении одного кадра продолжительностью 4,615 мс в одном частотном канале передается информация восьми временных слотов, в результате чего скорость передачи цифровой последовательности возрастает к (8x31,25) = 250 кбит/с.
На каждые 12 кадров канала трафика, что переносят речевую информацию (в мультикадре канала трафика информационными речевыми кадрами являются 0-11 и 13-25, в 12-ом кадре передается канал управления SACCH, а 26-ый кадр - пустой, резервный) прибавляется по одном кадру с информацией управления канала SACCH, который имеет скорость 20,833 кбит/с. Таким образом, скорость информационной битовой последовательности (речевого сигнала) на выходе кодера канала представляет:250 + 20,833 = 270,833 кбит/с.
Выше была рассмотрена процедура работы кодера канала только по помехоустойчивому кодированию речевого сигнала. Информация же каналов управления подвергается блочному и сверточному кодированию в полном объеме.
Так, для кодирования информации каналов: медленного соединенного канала управления SACCH; быстрого соединенного канала управления FACCH; канала вызова РСН; канала разрешения доступа AGCH; выделенных закрепленных каналов управления SDCCH используются блочный кодер (n, k) (224, 184), сверточный кодер (n, k, K) (2, 1, 5), а также схема перемеживания, аналогичная схеме перемеживания речевого канала
В каналах синхронизации SCH и случайного доступа RACH используются другие схемы блочного кодирования, а также сверточные кодеры (2, 1, 5), которые отличаются от сверточных кодеров вышеуказанных каналов управления.
При передаче компьютерных данных используются более сложные схемы сверточного кодирования и перемеживания, что обеспечивают соответственно и более высокое качество передачи информации.
Исходные сигналы канального кодера поступают на модулятор, задачам которого являются перенесения цифрового сигнала на несущую частоту, т.е. модуляция радиосигнала цифровым видеосигналом.
В стандарте GSM используется гауссова модуляция с минимальным частотным сдвигом (GMSK). При MSK-манипуляции несущая частота дискретно, через интервалы времени, кратные продолжительности информационного бита (T C), принимает одно из двух значений (постоянных на протяжении биту) – или , где – несущая частота радиоканала, – частота (скорость передачи) информационной битовой последовательности. Разнос частот ![]() – минимально возможный, при котором обеспечивается ортогональность колебаний с частотами и на интервале продолжительностью, которая равняется одному биту (Тс). При этом, за время Тс между колебаниями частот и набегает разность фаз, которая равняется . Иначе говоря, формирование MSK радиосигнала осуществляется таким образом, который на интервале одного информационного бита фаза несущей изменяется на . Беспрерывное изменение фазы синусоидального сигнала дает в результате частотную модуляцию с дискретным изменением частоты.
– минимально возможный, при котором обеспечивается ортогональность колебаний с частотами и на интервале продолжительностью, которая равняется одному биту (Тс). При этом, за время Тс между колебаниями частот и набегает разность фаз, которая равняется . Иначе говоря, формирование MSK радиосигнала осуществляется таким образом, который на интервале одного информационного бита фаза несущей изменяется на . Беспрерывное изменение фазы синусоидального сигнала дает в результате частотную модуляцию с дискретным изменением частоты.
Наименование «гауссова» манипуляция объясняется тем, что последовательность информационных бит на модулятор поступает через фильтр нижних частот (ФНЧ) с гауссовою амплитудно-частотной характеристикой. Применение гауссового фильтра разрешает уменьшить полосу частот излучаемого радиосигнала. Для GMSK модуляции произведение полосы фильтра (F) на продолжительность информационного бита () представляет величину.
Метод MSK логически рассматривать как метод квадратурной фазовой манипуляции (двукратной относительной фазовой манипуляции (QPSK)), в которой прямоугольные импульсы, которые модулируют продолжительностью заменены полуволновыми отрезками синусоид или косинусоид. На рис.1.6 приведена схема модулятора, временные диаграммы, которые иллюстрируют процесс формирования GMSK сигнала.
Сигнал определяется как напряжение или ток, который может быть передан как сообщение или как информация. По своей природе все сигналы являются аналоговыми, будь то сигнал постоянного илипеременного тока, цифровой или импульсный. Тем не менее, принято делать различие между аналоговыми и цифровыми сигналами.
Цифровым сигналом называется сигнал, определённым образом обработанный и преобразованный в цифры. Обычно эти цифровые сигналы связаны с реальными аналоговыми сигналами, но иногда между ними и нет связи. В качестве примера можно привести передачу данных в локальных вычислительных сетях (LAN) или в других высокоскоростных сетях.
В случае цифровой обработки сигнала (ЦОС) аналоговый сигнал преобразуется в двоичную форму устройством, которое называется аналого-цифровым преобразователем (АЦП). На выходе АЦП получается двоичное представление аналогового сигнала, которое затем обрабатывается арифметическим цифровым сигнальным процессором (DSP). После обработки содержащаяся в сигнале информация может быть преобразована обратно в аналоговую форму с использованием цифро-аналогового преобразователя (ЦАП).
Другой ключевой концепцией в определении сигнала является тот факт, что сигнал всегда несет некоторую информацию. Это ведет нас к ключевой проблеме обработки физических аналоговых сигналов — проблеме извлечения информации.
Цели обработки сигналов.
Главная цель обработки сигналов заключается в необходимости получения содержащейся в них информации. Эта информация обычно присутствует в амплитуде сигнала (абсолютной или относительной), в частоте или в спектральном составе, в фазе или в относительных временных зависимостях нескольких сигналов.
Как только желаемая информация будет извлечена из сигнала, она может быть использована различными способами. В некоторых случаях желательно переформатировать информацию, содержащуюся в сигнале.
В частности, изменение формата сигнала происходит при передаче звукового сигнала в телефонной системе с многоканальным доступом и частотным разделением (FDMA). В этом случае используются аналоговые методы, чтобы разместить несколько голосовых каналов в частотном спектре для передачи через радиорелейную станцию СВЧ диапазона, коаксиальный или оптоволоконный кабель.
В случае цифровой связи аналоговая звуковая информация сначала преобразуется в цифровую с использованием АЦП. Цифровая информация, представляющая индивидуальные звуковые каналы, мультиплексируется во времени (многоканальный доступ с временным разделением, TDMA) и передается по последовательной цифровой линии связи (как в ИКМ-системе).
Еще одна причина обработки сигналов заключается в сжатии полосы частот сигнала (без существенной потери информации) с последующим форматированием и передачей информации на пониженных скоростях, что позволяет сузить требуемую полосу пропускания канала. В высокоскоростных модемах и системах адаптивной импульсно-кодовой модуляции (ADPCM) широко используются алгоритмы устранения избыточности данных (сжатия), так же как и в цифровых системах мобильной связи, системах записи звука MPEG, в телевидении высокой четкости (HDTV).
Промышленные системы сбора данных и системы управления используют информацию, полученную от датчиков, для выработки соответствующих сигналов обратной связи, которые, в свою очередь, непосредственно управляют процессом. Обратите внимание, что эти системы требуют наличия как АЦП и ЦАП, так и датчиков, устройств нормализации сигнала (signal conditioners) и DSP (или микроконтроллеров).
В некоторых случаях в сигнале, содержащем информацию, присутствует шум, и основной целью является восстановление сигнала. Такие методы, как фильтрация, автокорреляция, свертка и т.д., часто используются для выполнения этой задачи и в аналоговой, и в цифровой областях.
ЦЕЛИ ОБРАБОТКИ СИГНАЛОВ- Извлечение информации о сигнале (амплитуда, фаза, частота, спектральные составляющие,временные соотношения)
- Преобразование формата сигнала (телефония с разделением каналов FDMA, TDMA, CDMA)
- Сжатие данных (модемы, сотовые телефоны, телевидение HDTV, сжатие MPEG)
- Формирование сигналов обратной связи (управление промышленными процессами)
- Выделение сигнала из шума (фильтрация, автокорреляция, свертка)
- Выделение и сохранение сигнала в цифровом виде для последующей обработки (БПФ)
Формирование сигналов
В большинстве приведенных ситуаций (связанных с использованием DSP-технологий), необходимы как АЦП, так и ЦАП. Тем не менее, в ряде случаев требуется только ЦАП, когда аналоговые сигналы могут быть непосредственно сгенерированы на основе DSP и ЦАП. Хорошим примером являются дисплеи с разверткой видеоизображения, в которых сгенерированный в цифровой форме сигнал управляет видеоизображением или блоком RAMDAC (преобразователем массива пиксельных значений из цифровой в аналоговую форму).
Другой пример — это искусственно синтезируемые музыка и речь. В действительности, при генерации физических аналоговых сигналов с использованием только цифровых методов полагаются на информацию, предварительно полученную из источников подобных физических аналоговых сигналов. В системах отображения данные на дисплее должны донести соответствующую информацию оператору. При разработке звуковых систем задаются статистическими свойствами генерируемых звуков, которые были предварительно определены с помощью широкого использования методов ЦОС (источник звука, микрофон, предварительный усилитель, АЦП и т.д.).
Методы и технологии обработки сигналов
Сигналы могут быть обработаны с использованием аналоговых методов (аналоговой обработки сигналов, или ASP), цифровых методов (цифровой обработки сигналов, или DSP) или комбинации аналоговых и цифровых методов (комбинированной обработки сигналов, или MSP). В некоторых случаях выбор методов ясен, в других случаях нет ясности в выборе и принятие окончательного решения основывается на определенных соображениях.
Что касается DSP, то главное отличие его от традиционного компьютерного анализа данных заключается в высокой скорости и эффективности выполнения сложных функций цифровой обработки, таких как фильтрация, анализ с использованием и сжатие данных в реальном масштабе времени.
Термин "комбинированная обработка сигналов" подразумевает, что системой выполняется и аналоговая, и цифровая обработка. Такая система может быть реализована в виде печатной платы, гибридной интегральной схемы (ИС) или отдельного кристалла с интегрированными элементами. АЦП и ЦАП рассматриваются как устройства комбинированной обработки сигналов, так как в каждом из них реализованы и аналоговые, и цифровые функции.
Недавние успехи технологии создания микросхем с очень высокой степенью интеграции (VLSI) позволяют осуществлять комплексную (цифровую и аналоговую) обработку на одном кристалле. Сама природа ЦОС подразумевает, что эти функции могут быть выполнены в режиме реального масштаба времени.
Сравнение аналоговой и цифровой обработки сигналов
Сегодняшний инженер стоит перед выбором надлежащей комбинации аналоговых и цифровых методов для решения задачи обработки сигналов. Невозможно обработать физические аналоговые сигналы, используя только цифровые методы, так как все датчики (микрофоны, термопары, пьезоэлектрические кристаллы, головки накопителя на магнитных дисках и т.д.) являются аналоговыми устройствами.
Некоторые виды сигналов требуют наличия цепей нормализации для дальнейшей обработки сигналов как аналоговым так и цифровым методом. Цепи нормализации сигнала — это аналоговые процессоры, выполняющие такие функции как усиление, накопление (в измерительных и предварительных (буферных) усилителях), обнаружение сигнала на фоне шума (высокоточными усилителями синфазного сигнала, эквалайзерами и линейными приемниками), динамическое сжатие диапазона (логарифмическими усилителями, логарифмическими ЦАП и усилителями с программируемым коэффициентом усиления) и фильтрация (пассивная или активная).
Несколько методов реализации процесса обработки сигналов показано на рисунке 1. В верхней области рисунка изображен чисто аналоговый подход. В остальных областях изображена реализация DSP. Обратите внимание, что, как только выбрана DSP технология, следующим решением должно быть определение местоположения АЦП в тракте обработки сигнала.
ОБРАБОТКА АНАЛОГОВЫХ И ЦИФРОВЫХ СИГНАЛОВ
Рисунок 1. Способы обработки сигналов
Вообще, поскольку АЦП перемещен ближе к датчику, большая часть обработки аналогового сигнала теперь производится АЦП. Увеличение возможностей АЦП может выражаться в увеличении частоты дискретизации, расширении динамического диапазона, повышении разрешающей способности, отсечении входного шума, использовании входной фильтрации и программируемых усилителей (PGA), наличии источников опорного напряжения на кристалле и т.д. Все упомянутые дополнения повышают функциональный уровень и упрощают систему.
При наличии современных технологий производства ЦАП и АЦП с высокими частотами дискретизации и разрешающими способностями существенный прогресс достигнут в интеграции все большего числа цепей непосредственно в АЦП /ЦАП.
В сфере измерений, например, существуют 24-битные АЦП со встроенными программируемыми усилителями (PGA), которые позволяют оцифровывать полномасштабные мостовые сигналы 10 mV непосредственно, без последующей нормализации (например серия AD773x).
На голосовых и звуковых частотах распространены комплексные устройства кодирования-декодирования&nbp;— кодеки (Analog Front End, AFE), которые имеют встроенную в микросхему аналоговую схему, удовлетворяющую минимуму требований к внешним компонентам нормализации (AD1819B и AD73322).
Существуют также видео-кодеки (AFE) для таких задач, как обработка изображения с помощью ПЗС (CCD), и другие (например, серии AD9814, AD9816, и AD984X).
Пример реализации
В качестве примера использования DSP сравним аналоговый и цифровой фильтры низкой частоты (ФНЧ), каждый с частотой среза 1 кГц.
Цифровой фильтр реализован в виде типовой цифровой системы, показанной на рисунок 2. Обратите внимание, что в диаграмме принято несколько неявных допущений. Во -первых, чтобы точно обработать сигнал, принимается, что тракт АЦП /ЦАП обладает достаточными значениями частоты дискретизации, разрешающей способности и динамического диапазона. Во -вторых, для того, чтобы закончить все свои вычисления в пределах интервала дискретизации (1/f s), устройство ЦОС должно иметь достаточное быстродействие. В -третьих, на входе АЦП и выходе ЦАП сохраняется потребность в аналоговых фильтрах ограничения и восстановления спектра сигнала (anti-aliasing filter и anti-imaging filter), хотя требования к их производительности невелики. Приняв эти допущения, можно сравнить цифровой и аналоговый фильтры.

Рисунок 2. Структурная схема цифрового фильтра
Требуемая частота среза обоих фильтров — 1 кГц. Аналоговое преобразование реализуется первого рода шестого порядка (характеризуется наличием пульсаций коэффициента передачив полосе пропускания и отсутствием пульсаций вне полосы пропускания). Его характеристики представлены на рисунке 2. На практике этот фильтр может быть представлен тремя фильтрами второго порядка, каждый из которых построен на операционном усилителе и нескольких и конденсаторах. С помощью современных систем автоматизированного проектирования (САПР) фильтров создать фильтр шестого порядка достаточно просто, но чтобы удовлетворить техническим требованиям по неравномерности характеристики 0,5 дБ, требуется точный подбор компонентов.
Представленный же на рисунке 2 цифровой КИХ-фильтр со 129 коэффициентами имеет неравномерность характеристики всего 0,002 дБ в полосе пропускания, линейную фазовую характеристику и намного более крутой спад. На практике такие характеристики невозможно реализовать с использованием аналоговых методов. Другое очевидное преимущество схемы состоит в том, что цифровой фильтр не требует подбора компонентов и не подвержен дрейфу параметров, так как частота синхронизации фильтра стабилизирована кварцевым резонатором. Фильтр со 129 коэффициентами требует 129 операций умножения с накоплением (MAC) для вычисления выходного отсчёта. Эти вычисления должны быть закончены в пределах интервала дискретизации 1/fs, чтобы обеспечить работу в реальном масштабе времени. В этом примере частота дискретизации равна 10 кГц, поэтому для обработки достаточно 100 мкс, если не требуется производить существенных дополнительных вычислений. Семейство DSP ADSP-21xx может закончить весь процесс умножения с накоплением (и другие функции, необходимые для реализации фильтра) за один командный цикл. Поэтому фильтр со 129 коэффициентами требует быстродействия более 129/100 мкс = 1,3 миллиона операций с секунду (MIPS). Существующие DSP имеют намного большее быстродействие и, таким образом, не являются ограничивающим фактором для этих приложений. Быстродействие серии 16-разрядных ADSP-218x с фиксированной точкой достигает 75MIPS. В листинге 1 приведен ассемблерный код, реализующий фильтр на DSP процессорах семейства ADSP-21xx. Обратите внимание, что фактические строки исполняемого кода помечены стрелками; остальное — это комментарии.

Рисунок 3. аналогового и цифрового фильтров
Конечно, на практике имеется много других факторов, рассматриваемых при сравнительной оценке аналоговых и цифровых фильтров или аналоговых и цифровых методов обработки сигнала вообще. В современных системах обработки сигналов комбинируются аналоговые и цифровые методы реализации желаемой функции и используются преимущества лучших методов, как аналоговых, так и цифровых.
ПРОГРАММА НА АССЕМБЛЕРЕ:
FIR ФИЛЬТР ДЛЯ ADSP-21XX (ОДИНАРНАЯ ТОЧНОСТЬ)
MODULE fir_sub;
{ Подпрограмма КИХ фильтра
Параметры вызова подпрограммы
I0 --> Наиболее старые данные в линии задержки
I4 --> Начало таблицы коэффициентов фильтра
L0 = Длина фильтра (N)
L4 = Длина фильтра (N)
M1,M5 = 1
CNTR = Длина фильтра - 1 (N-1)
Возвращаемые значения
MR1 = Результат суммирования (округлённый и ограниченный)
I0 --> Наиболее старые данные в линии задержки
I4 --> Начало таблицы коэффициентов фильтра
Изменяемые регистры
MX0,MY0,MR
Время работы
(N - 1) + 6 cycles = N + 5 cycles
Все коэффициенты записаны в формате 1.15 }
.ENTRY fir;
fir: MR=0, MX0=DM(I0,M1), MY0=PM(I4,M5)
CNTR = N-1;
DO convolution UNTIL CE;
convolution: MR=MR+MX0*MY0(SS), MX0=DM(I0,M1), MY0=PM(I4,M5);
MR=MR+MX0*MY0(RND);
IF MV SAT MR;
RTS;
.ENDMOD;
ОБРАБОТКА СИГНАЛОВ В РЕАЛЬНОМ ВРЕМЕНИ
Литература:
Вместе со статьей "Виды сигналов" читают:
Каждый день люди сталкиваются с использованием электронных приборов. Без них невозможна современная жизнь. Ведь речь идет о телевизоре, радио, компьютере, телефоне, мультиварке и прочем. Раньше, еще несколько лет назад, никто не задумывался о том, какой сигнал используется в каждом работоспособном приборе. Сейчас же слова «аналоговый», «цифровой», «дискретный» уже давно на слуху. Некоторые виды сигналов из перечисленных являются качественными и надежными.
Цифровая передача стала использоваться намного позже, чем аналоговая. Это связано с тем, что такой сигнал намного проще обслуживать, да и техника на тот момент не была настолько усовершенствована.
С понятием «дискретность» сталкивается каждый человек постоянно. Если переводить это слово с латинского языка, то означать оно будет «прерывистость». Углубляясь далеко в науку, можно сказать, что дискретный сигнал представляет собой метод передачи информации, который подразумевает изменение во времени среды-переносчика. Последняя принимает любое значение из всех возможных. Сейчас дискретность уходит на второй план, после того, как было принято решение производить системы на чипе. Они являются целостными, а все компоненты тесно взаимодействуют друг с другом. В дискретности же все с точностью наоборот - каждая деталь завершена и связана с другими за счет специальных линий связи.
Сигнал
Сигнал представляет собой специальный код, который передается в пространство одной или несколькими системами. Эта формулировка является общей.
В сфере информации и связи сигналом назван специальный носитель каких-либо данных, который используется для передачи сообщений. Он может быть создан, но не принят, последнее условие не обязательно. Если же сигнал является сообщением, то его «ловля» считается необходимой.
Описываемый код задается математической функцией. Она характеризует все возможные изменения параметров. В радиотехнической теории эта модель считается базовой. В ней же аналогом сигнала был назван шум. Он представляет собой функцию времени, которая свободно взаимодействует с переданным кодом и искажает его.
В статье охарактеризованы виды сигналов: дискретный, аналоговый и цифровой. Также коротко дана основная теория по описываемой теме.
Виды сигналов
Существует несколько имеющихся сигналов. Рассмотрим, какие бывают виды.
- По физической среде носителя данных разделяют электрический сигнал, оптический, акустический и электромагнитный. Имеется еще несколько видов, однако они малоизвестны.
- По способу задания сигналы делятся на регулярные и нерегулярные. Первые представляют собой детерминированные методы передачи данных, которые задаются аналитической функцией. Случайные же формулируются за счет теории вероятности, а также они принимают любые значения в различные промежутки времени.
- В зависимости от функций, которые описывают все параметры сигнала, методы передачи данных могут быть аналоговыми, дискретными, цифровыми (способ, который является квантованным по уровню). Они используются для обеспечения работы многих электрических приборов.
Теперь читателю известны все виды передачи сигналов. Разобраться в них не составит труда любому человеку, главное - немного подумать и вспомнить школьный курс физики.

Для чего обрабатывается сигнал?
Сигнал обрабатывается с целью передачи и получения информации, которая в нем зашифрована. Как только она будет извлечена, ее можно использовать различными способами. В отдельных ситуациях ее переформатируют.
Существует и другая причина обработки всех сигналов. Она заключается в небольшом сжатии частот (чтобы не повредить информацию). После этого ее форматируют и передают на медленных скоростях.
В аналоговом и цифровом сигналах используются особенные методы. В частности, фильтрация, свертка, корреляция. Они необходимы для восстановления сигнала, если он поврежден или имеет шум.
Создание и формирование
Зачастую для формирования сигналов необходим аналого-цифровой (АЦП) и Чаще всего они оба используются лишь в ситуации с применением DSP-технологий. В остальных случаях подойдет только использование ЦАП.
При создании физических аналоговых кодов с дальнейшим применением цифровых методов полагаются на полученную информацию, которая передается со специальных приборов.
Динамический диапазон
Вычисляется разностью большего и меньшего уровня громкости, которые выражены в децибелах. Он полностью зависит от произведения и особенностей исполнения. Речь идет как о музыкальных треках, так и об обычных диалогах между людьми. Если брать, например, диктора, который читает новости, то его динамический диапазон колеблется в районе 25-30 дБ. А во время чтения какого-либо произведения он может вырастать до 50 дБ.

Аналоговый сигнал
Аналоговый сигнал является непрерывным во времени способом передачи данных. Недостатком его можно назвать присутствие шума, который иногда приводит к полной потере информации. Очень часто возникают такие ситуации, что невозможно определить, где в коде важные данные, а где обычные искажения.
Именно из-за этого цифровая обработка сигналов приобрела большую популярность и постепенно вытесняет аналоговую.

Цифровой сигнал
Цифровой сигнал является особым он описывается за счет дискретных функций. Его амплитуда может принять определенное значение из уже заданных. Если аналоговый сигнал способен поступать с огромным количеством шумов, то цифровой отфильтровывает большую часть полученных помех.
Помимо этого, такой вид передачи данных переносит информацию без лишней смысловой нагрузки. Через один физический канал может быть отправлено сразу несколько кодов.
Виды цифрового сигнала не существуют, так как он выделяется как отдельный и самостоятельный метод передачи данных. Он представляет собой двоичный поток. В наше время такой сигнал считается самым популярным. Это связано с простотой использования.

Применение цифрового сигнала
Чем же отличается цифровой электрический сигнал от других? Тем, что он способен совершать в ретрансляторе полную регенерацию. Когда в оборудование связи поступает сигнал, имеющий малейшие помехи, он сразу же меняет свою форму на цифровую. Это позволяет, например, телевышке снова сформировать сигнал, но уже без шумового эффекта.
В том случае, если код поступает уже с большими искажениями, то, к сожалению, восстановлению он не подлежит. Если брать в сравнении аналоговую связь, то в аналогичной ситуации ретранслятор может извлечь часть данных, затрачивая много энергии.
Обсуждая сотовую связь разных форматов, при сильном искажении на цифровой линии разговаривать практически невозможно, так как не слышны слова или целые фразы. Аналоговая связь в таком случае более действенна, ведь можно продолжать вести диалог.
Именно из-за подобных неполадок цифровой сигнал ретрансляторы формируют очень часто для того, чтобы сократить разрыв линии связи.

Дискретный сигнал
Сейчас каждый человек пользуется мобильным телефоном или какой-то «звонилкой» на своем компьютере. Одна из задач приборов или программного обеспечения - это передача сигнала, в данном случае голосового потока. Для переноса непрерывной волны необходим канал, который имел бы пропускную способность высшего уровня. Именно поэтому было предпринято решение использовать дискретный сигнал. Он создает не саму волну, а ее цифровой вид. Почему же? Потому что передача идет от техники (например, телефона или компьютера). В чем плюсы такого вида переноса информации? С его помощью уменьшается общее количество передаваемых данных, а также легче организуется пакетная отправка.
Понятие «дискретизация» уже давно стабильно используется в работе вычислительной техники. Благодаря такому сигналу передается не непрерывная информация, которая полностью закодирована специальными символами и буквами, а данные, собранные в особенные блоки. Они являются отдельными и законченными частицами. Такой метод кодировки уже давно отодвинулся на второй план, однако не исчез полностью. С помощью него можно легко передавать небольшие куски информации.

Сравнение цифрового и аналогового сигналов
Покупая технику, вряд ли кто-то думает о том, какие виды сигналов использованы в том или другом приборе, а об их среде и природе уж тем более. Но иногда все же приходится разбираться с понятиями.
Уже давно стало ясно, что аналоговые технологии теряют спрос, ведь их использование нерационально. Взамен приходит цифровая связь. Нужно понимать, о чем идет речь и от чего отказывается человечество.
Если говорить коротко, то аналоговый сигнал - способ передачи информации, который подразумевает описание данных непрерывными функциями времени. По сути, говоря конкретно, амплитуда колебаний может быть равна любому значению, находящемуся в определенных границах.
Цифровая обработка сигналов описывается дискретными функциями времени. Иначе говоря, амплитуда колебаний этого метода равна строго заданным значениям.
Переходя от теории к практике, надо сказать о том, что аналоговому сигналу характерны помехи. С цифровым же таких проблем нет, потому что он успешно их «сглаживает». За счет новых технологий такой метод передачи данных способен своими силами без вмешательства ученого восстановить всю исходную информацию.
Говоря о телевидении, можно уже с уверенностью сказать: аналоговая передача давно изжила себя. Большинство потребителей переходят на цифровой сигнал. Минус последнего заключается в том, что если аналоговую передачу способен принимать любой прибор, то более современный способ - только специальная техника. Хоть и спрос на устаревший метод уже давно упал, все же такие виды сигналов до сих пор не способны полностью уйти из повседневной жизни.






Обзор Samsung Galaxy A7 (2017): не боится воды и экономии Стоит ли покупать samsung a7
Делаем бэкап прошивки на андроиде
Как настроить файл подкачки?
Установка режима совместимости в Windows
Резервное копирование и восстановление драйверов Windows